德国卡尔斯鲁厄理工学院开发出一种 AR 应用程序,名为 Iviz,能够可视化来自智能手机、平板电脑和 Microsoft Hololens 2 上的机器人数据(ROS),如点云和交互式标记,还可通过 AR 中的虚拟操纵杆在真实环境中对机器人进行控制。
ROS 是机器人操作系统的基础,近年来已成为开源机器人编程的标准。该软件框架可帮助开发人员对机器人应用程序进行编程。它包含用于本地化、路径规划、映射和数据可视化的库和工具。
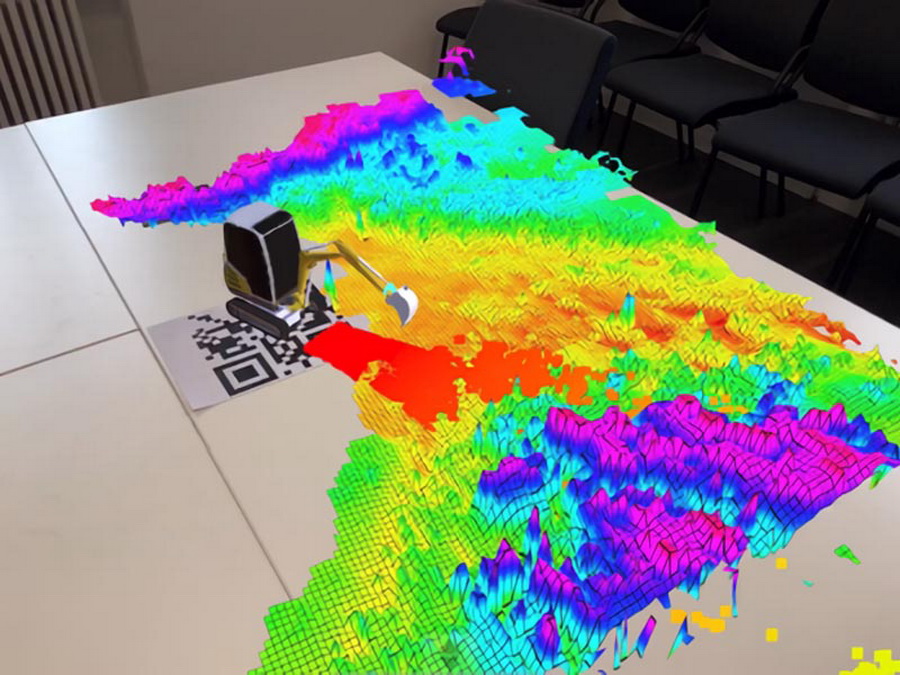
此前,可视化仅限于在本地连接的计算机上显示,如 rviz 等工具可用于将机器人捕捉到的数据可视化为 3D 图形,例如通过摄像机或激光扫描。因此,它会在监视器上显示机器人的行为、所见和所想。想要在智能手机或平板电脑上看到系统中发生的事情的用户须依赖于低交互屏幕镜像或网络浏览器版本的“rviz”。而 AR 应用 Iviz 则使直接在移动设备上显示成为可能。
Iviz 基于 Unity 引擎,为 Android、iOS 和 UWP 等移动平台专门开发,同时还支持 AR。它主要用于智能手机、平板电脑和 Microsoft Hololens。在 Linux、Windows 或 Mac OS 的计算机上也可以不受限制地使用。与移动设备的兼容性主要是为了解决一个问题:将用户连接到 PC 站点,使数据可以直接在机器人的活动位置查看,这可以提供重要的基于上下文的信息。
Iviz 的 AR 模块允许你为机器人添加交互式标记。这使得物体的空间表现可以被抓住或者目标关节的位置能够被显示。使用虚拟操纵杆和 Microsoft Hololens2,你可以在真实环境中控制机器人,让它与虚拟物体互动。
然而,在开发过程中,卡尔斯鲁厄理工学院的研发团队也遇到了系统的局限性问题,例如在插件的创建方面。此外,现有的 ROS 应用程序在 Unity 中不易使用。尽管如此,人们相信,iviz 为 ROS 社区做出了有益的贡献。研究人员希望下一步将 Iviz 移植到 VR 应用中。【数字叙事 黎雾】

